Here we addressed the question as to how we can automatically detect and represent structure in high-dimensional sensorimotor maps under dynamically changing contexts.
+ Key Techniques : - Non-parametric modelling of high-dimensional regression data
- Algorithms for context switching detection
- Statistical machine learning for structure discovery
+ Main Results :
- Discovering structure of sensorimotor interaction
- Fast, robust algorithms for online learning of sensorimotor dynamics
- Managing sensorimotor structures under multiple contexts
 (Partner: UEDIN) (Partner: UEDIN)
We developed machine learning algorithms that are capable of acquiring the dynamics from movement data such that - inaccurate and unmodelled components of analytical model based dynamics can be compensated for;
- sensory information (such as haptic data) under multiple contexts and contact scenarios can be incorporated into learned models for control and discrimination of contexts;
- we can automatically extract complex sensorimotor contingency through online learning.
Recent anthropomorphic robots, most notably the arm-hand system developed within the SENSOPAC project at DLR, feature a complex kinematic structure with many degrees of freedom. Consequently, the forward and inverse dynamics are very complicated, and an analytic derivation of these mappings is cumbersome, subject to approximations, or even impossible. Since an accurate model of the dynamics is the key to precise, yet compliant control of the robot, it is desirable to learn such a model from data. More importantly, when learning an internal model of the dynamics, we can incorporate haptic information and therefore learn about the structure of the sensorimotor space. Furthermore, the model can be adapted to changes in the environment.
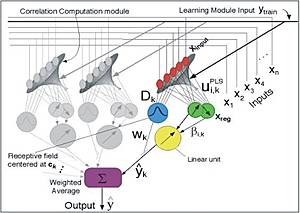
The inverse dynamics mapping (from the current state and the desired change to the necessary motor commands) has a high input dimensionality, so many standard regression techniques designed for rather low dimensionalities fail. In our approach, based on the Locally Weighted Projection Regression (LWPR) algorithm, we approximate the global regression function by a mixture of multiple linear models, each of which is "responsible" in a certain region as determined by a center and an automatically adapted distance metrics. The local regression models are learned using partial least squares, and leave-one-out cross-validation is utilised for ongoing assessment and complexity control of the model. Local models can be added and purged as required during training.
We have recently developed a new implementation of LWPR for C/C++, Matlab/Octave and Python. The software package is freely available and can be downloaded from http://www.ipab.inf.ed.ac.uk/slmc/software/lwpr/.
We also investigate Bayesian methods to address the problem of open parameters like learning rates, forgetting factors, and initial distance metrics. By formulating a novel Randomly Varying Coefficient model, we bring together two separate lines of research: We combined the efficiency of non-competitive locally weighted learning schemes with the recognised modelling strength of Bayesian approaches.
 (Partner: UEDIN) (Partner: UEDIN)
A visionary goal within the SENSOPAC project was a machine that is able to discover the sensorimotor relationships by active sensing and exploratory actions, and that can generate a cognitive notion of objects through interaction. For this, a key issue is the ability to estimate and switch between contexts of the dynamics, which arise from manipulating different objects.
Such interaction with a changing environment causes non-stationarity of the dynamics and introduces significant complications in motor learning and control, since the learned dynamics model will have to be constantly adapted to the current situation. If contexts reoccur, then forgetting what has been previously learned and relearning it is a suboptimal strategy. The goal of this work is to overcome this problem and use the previously acquired experience to deal with re-occurring contexts.
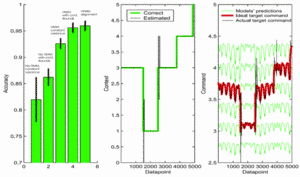
A first approach is to assume that there is a finite number of contexts and formulate a multiple model scenario: instead of using and adapting only one dynamics model, a set of models is used, each of which is appropriate for a different environment. The first key issue is how to robustly determine the correct model for any given situation, which we refer to as context estimation. Robust context estimates are important both for control and learning of the models. We approach this problem by formulating a probabilistic model that represents the context as a latent switching variable. The context can then be estimated using simple probabilistic inference in an online fashion.
While the experienced dynamics may for many scenarios be sufficient for estimating the context, it is reasonable to assume that use of additional sensory information should enhance context estimation and learning under non-stationary conditions. In particular incorporated measurements of tactile sensors to derive context estimates.
(Partner: UEDIN)
The sensorimotor space, a space in which motor actions and sensory inputs are combined, has a very high dimensionality. Motor actions and sensory inputs, however, do not change independently. Motor actions lead to certain, principled changes in sensory input. These regularities are known under the concept of sensorimotor contingencies, but they can also be described as structures in sensorimotor space. We investigate methods to infer such lower dimensional structures in a data driven way. Our aim is to find low-dimensional spaces which capture the most important aspects of sensorimotor data, which are robust against noise in the data and, very importantly, which allow generalisation such that new points in low dimensional space map to points in original sensorimotor space which are consistent with the data. Additionally, the low-dimensional spaces relate easily to properties of the environment and can therefore be interpreted as defining cognitive notions about the environment.
|
|
